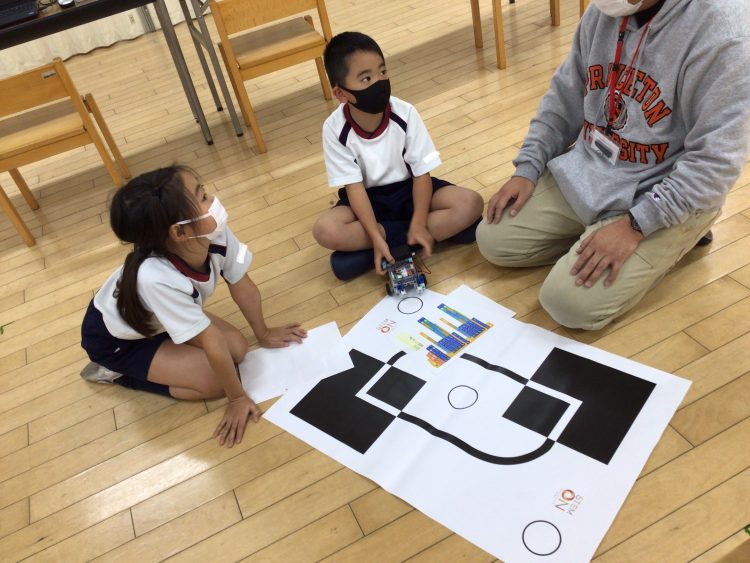
2021.11.26 ロボットプログラム(11/26) プログラム(スタディ) Home » アフターブログ » ロボットプログラム(11/26) このページをシェアする 本日のロボットプログラムの様子です。 始めに前半の様子です。 本日は、ブロックを組み立てて“ロープウェイ“を作りました。 二点の地点をワイヤーで見立てた紐で繋ぎ、地点にあるハンドルを回してドンゴラを動かします。 続いて後半の様子です。 コースを走る車の動きをプログラミングしました。 コースは急に反転するものや、90度で曲がるところがあったため、そこの変化に伴った動きをプログラミングするのが難しそうでした。 次も頑張りましょう!