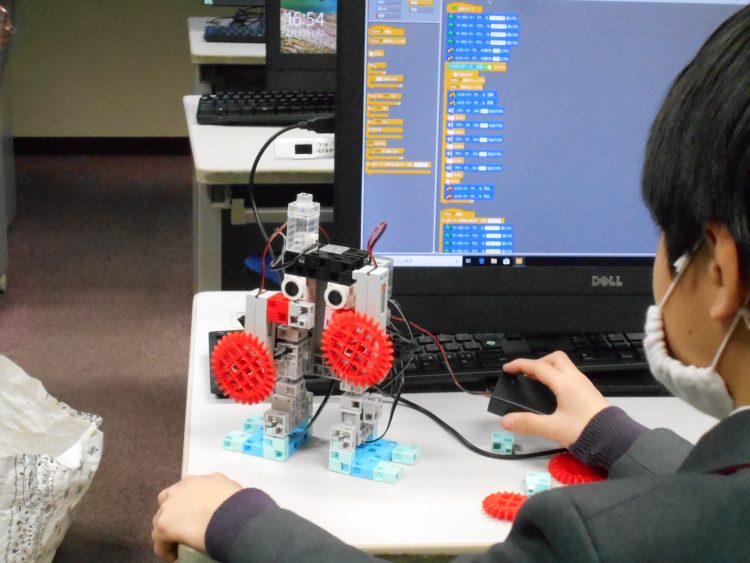
2021.02.03 ペンギンロボットの足を動かそう(プログラミング) プログラム(スタディ) Home » アフターブログ » ペンギンロボットの足を動かそう(プログラミング) このページをシェアする 本日のロボットプログラムの様子です。 まずは前半の様子です。 今までに作った、紙飛行機発射台にレバーを取り付ける作業をしました。 レバーの傾きは“加速度センサー”を使って、調整します。 真剣に取り組めましたね! 続いて後半の様子です。 ペンギン型の二足歩行ロボットの足を動かすプログラムを作ります。 動きに合わせて、音が鳴るプログラムをつけるなどをしました。 上手に応用して取り組むことができましたね! 次回も頑張りましょう!!